


Խելացի ռոբոտացված խոտհնձիչները համարվում են բազմամիլիարդ դոլարանոց շուկա՝ հիմնականում հետևյալ նկատառումներից ելնելով.
1. Շուկայի հսկայական պահանջարկ. Եվրոպայի և Հյուսիսային Ամերիկայի նման տարածաշրջաններում անձնական այգի կամ մարգագետին ունենալը շատ տարածված է, ինչը մարգագետնի խոտհնձումը դարձնում է նրանց առօրյա կյանքի կարևորագույն առաջադրանք: Ավանդական ձեռքով խոտհնձումը կամ խոտհնձման համար աշխատողներ վարձելը ոչ միայն ժամանակատար և աշխատատար է, այլև թանկ: Հետևաբար, շուկայում կա զգալի պահանջարկ խելացի ռոբոտացված մարգագետնի խոտհնձիչների նկատմամբ, որոնք կարող են ինքնուրույն կատարել խոտհնձման աշխատանքները:
2. Տեխնոլոգիական նորարարության հնարավորություններ. Սենսորների, նավիգացիոն համակարգերի և արհեստական բանականության նման տեխնոլոգիաների շարունակական զարգացման շնորհիվ, խելացի ռոբոտացված խոտհնձիչների աշխատանքը անընդհատ բարելավվել է, և դրանց ֆունկցիոնալությունը դարձել է ավելի ու ավելի հարուստ։ Դրանք կարող են ապահովել ինքնավար նավարկություն, խոչընդոտներից խուսափել, ճանապարհի պլանավորում, ավտոմատ լիցքավորում և այլն, ինչը զգալիորեն բարելավում է խոտհնձման արդյունավետությունն ու հարմարավետությունը։ Այս տեխնոլոգիական նորարարությունը ամուր հիմք է հանդիսանում խելացի ռոբոտացված խոտհնձիչների շուկայի արագ զարգացման համար։
3. Շրջակա միջավայրի պաշտպանության և էներգաարդյունավետության միտումներ. Ավանդական ձեռքի կամ գազային շարժիչով աշխատող խոտհնձիչների համեմատ, խելացի ռոբոտացված խոտհնձիչներն ունեն ավելի ցածր աղմուկ և արտանետումներ, ինչը հանգեցնում է շրջակա միջավայրի վրա ազդեցության ավելի քիչ ազդեցության: Շրջակա միջավայրի պաշտպանության և էներգաարդյունավետության միտումներով պայմանավորված՝ սպառողների աճող թիվն է ընտրում խելացի ռոբոտացված խոտհնձիչներ՝ ավանդական խոտհնձման մեթոդները փոխարինելու համար:
4. Հասուն արդյունաբերական շղթա. Չինաստանն ունի ամբողջական մեքենաշինության արտադրության արդյունաբերական շղթա՝ հետազոտությունների և զարգացման, նախագծման, արտադրության և վաճառքի ուժեղ կարողություններով: Սա թույլ է տալիս Չինաստանին արագ արձագանքել համաշխարհային շուկայի պահանջարկին և արտադրել բարձրորակ, մրցունակ խելացի ռոբոտացված խոտհնձիչներ: Բացի այդ, համաշխարհային արտադրական արդյունաբերությունների փոխանցման և արդիականացման հետ մեկտեղ, կանխատեսվում է, որ Չինաստանի բաժինը խելացի ռոբոտացված խոտհնձիչների համաշխարհային շուկայում կշարունակի աճել:
Ամփոփելով՝ հիմնվելով այնպիսի գործոնների վրա, ինչպիսիք են շուկայական հսկայական պահանջարկը, տեխնոլոգիական նորարարության ընձեռած հնարավորությունները, շրջակա միջավայրի պաշտպանության և էներգաարդյունավետության միտումները, ինչպես նաև արդյունաբերական զարգացած ցանցը, խելացի ռոբոտացված խոտհնձիչները համարվում են բազմամիլիարդ դոլարանոց ներուժ ունեցող շուկա։
Նախագծի նպատակները
Ահա նախագծի նպատակների համառոտ ակնարկը.
✔️ Ավտոմատ խոտհնձում. Սարքը պետք է կարողանա խոտհնձել ավտոմատ կերպով։
✔️ Լավ անվտանգության հատկանիշներ. Սարքը պետք է անվտանգ լինի, օրինակ՝ արտակարգ կանգառի դեպքում, երբ այն բարձրացվի կամ խոչընդոտների հանդիպի։
✔️ Պերիմետրիկ լարերի կարիք չկա. Մենք ցանկանում ենք ճկունություն և հենարան բազմաթիվ խոտհնձման տարածքների համար՝ առանց պարագծային լարերի անհրաժեշտության:
✔️ Ցածր գին. Այն պետք է ավելի էժան լինի, քան միջին դասի առևտրային արտադրանքը։
✔️ Բաց. Ես ուզում եմ կիսվել գիտելիքներով և հնարավորություն տալ ուրիշներին ստեղծել OpenMower:
✔️ Գեղագիտական տեսք. Դուք չպետք է ամաչեք OpenMower-ն օգտագործել խոտհնձիչով։
✔️ Խոչընդոտներից խուսափելը. խոտհնձիչը պետք է հայտնաբերի խոչընդոտները խոտհնձման ժամանակ և խուսափի դրանցից։
✔️ Անձրևի չափիչ. Սարքը պետք է կարողանա հայտնաբերել անբարենպաստ եղանակային պայմանները և դադարեցնել խոտհունձը մինչև պայմանների բարելավումը։
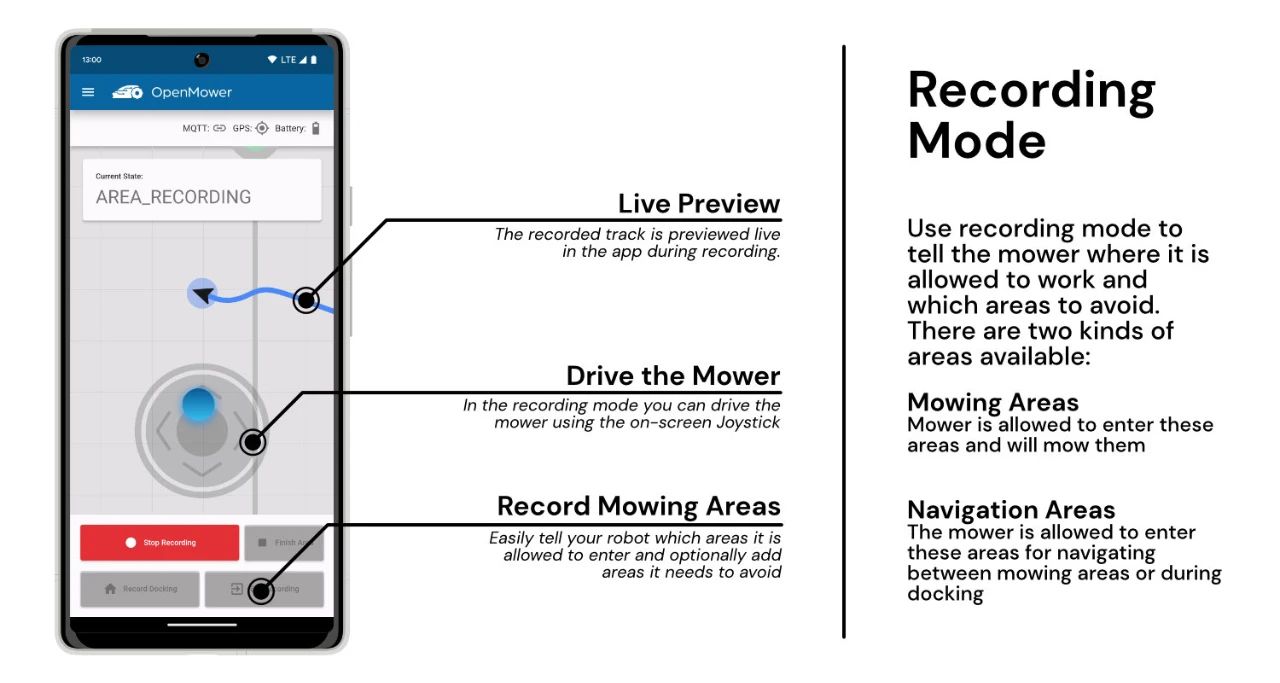
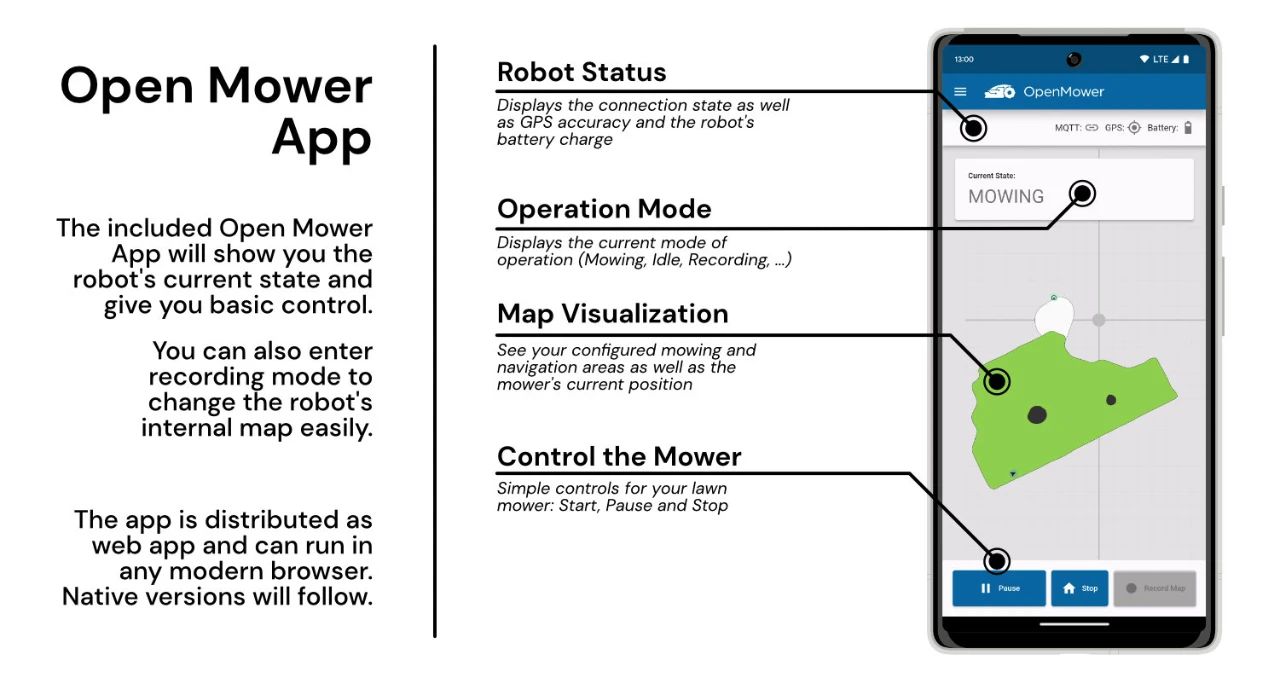
Հավելվածների ցուցադրություն
Սարքավորումներ
Մինչ այժմ մենք ունենք մայրական սալիկի կայուն տարբերակ և երկու ուղեկցող շարժիչի կառավարիչներ՝ xESC mini-ն և xESC 2040-ը: Ներկայումս ես օգտագործում եմ xESC mini-ն հավաքման համար, և այն հիանալի աշխատում է: Այս կառավարիչի խնդիրն այն է, որ դժվար է գտնել դրա բաղադրիչները: Ահա թե ինչու մենք ստեղծում ենք xESC 2040-ը՝ հիմնվելով RP2040 չիպի վրա: Սա էժան տարբերակ է, որը ներկայումս գտնվում է փորձարարական փուլում:
Սարքավորումների անելիքների ցանկ
Նախագծի մոտեցում
Մենք ապամոնտաժեցինք ամենաէժան պատրաստի ռոբոտ-խոտհնձիչը, որը կարողացանք գտնել (YardForce Classic 500) և հաճելիորեն զարմացանք սարքավորումների որակից։
Անիվների համար նախատեսված փոխանցումային անխոզանակ շարժիչներ
Անխոզանակ շարժիչներ խոտհնձիչի համար
Ընդհանուր կառուցվածքը թվում էր ամուր, ջրակայուն և լավ մտածված
Բոլոր բաղադրիչները միացված էին ստանդարտ միակցիչների միջոցով, ինչը հեշտացնում էր սարքավորումների արդիականացումը։
Խոտհնձիչի գլխավոր տախտակ

ROS աշխատանքային տարածք
Այս թղթապանակը ծառայում է որպես ROS աշխատանքային տարածք, որն օգտագործվում է OpenMower ROS ծրագիրը կառուցելու համար: Պահոցը պարունակում է ROS փաթեթներ OpenMower-ը կառավարելու համար:
Այն նաև հղում է կատարում ծրագրակազմը կառուցելու համար անհրաժեշտ այլ պահոցների (գրադարանների): Սա թույլ է տալիս մեզ հետևել յուրաքանչյուր թողարկման մեջ օգտագործված փաթեթների ճշգրիտ տարբերակներին՝ համատեղելիությունն ապահովելու համար: Ներկայումս այն ներառում է հետևյալ պահոցները.
slic3r_ծածկույթի_պլանավորող:Slic3r ծրագրի վրա հիմնված 3D տպիչի ծածկույթի պլանավորիչ: Սա օգտագործվում է խոտհնձման ուղիները պլանավորելու համար:
teb_local_planner:Տեղական պլանավորող, որը թույլ է տալիս ռոբոտին շրջանցել խոչընդոտները և հետևել գլոբալ հետագծին՝ պահպանելով կինեմատիկական սահմանափակումները։
xesc_ros:ROS ինտերֆեյսը xESC շարժիչի կարգավորիչի համար։

Եվրոպայում և Ամերիկայում շատ տնային տնտեսություններ ունեն իրենց սեփական այգիները կամ մարգագետինները՝ առատ հողային ռեսուրսների պատճառով, ուստի անհրաժեշտ է պարբերաբար խոտհնձել: Խոտհնձման ավանդական մեթոդները հաճախ ենթադրում են աշխատողների վարձում, ինչը ոչ միայն բարձր ծախսեր է ենթադրում, այլև պահանջում է զգալի ժամանակ և ջանքեր վերահսկողության և կառավարման համար: Հետևաբար, խելացի ավտոմատացված խոտհնձիչները մեծ շուկայական ներուժ ունեն:
Ավտոմատ խոտհնձիչները ներառում են առաջադեմ սենսորներ, նավիգացիոն համակարգեր և արհեստական բանականության տեխնոլոգիա, ինչը թույլ է տալիս նրանց ինքնուրույն խոտհնձել մարգագետինները, անցնել խոչընդոտների միջով և պլանավորել ուղիները: Օգտատերերը պարզապես պետք է սահմանեն խոտհնձման տարածքը և բարձրությունը, և ավտոմատ խոտհնձիչը կարող է ավտոմատ կերպով ավարտել խոտհնձման առաջադրանքը՝ զգալիորեն բարելավելով արդյունավետությունը և խնայելով աշխատուժի ծախսերը:
Ավելին, ավտոմատ խոտհնձիչները ունեն շրջակա միջավայրի համար անվտանգ և էներգաարդյունավետ լինելու առավելությունները: Համեմատած ավանդական ձեռքի կամ գազային շարժիչով խոտհնձիչների հետ, ավտոմատ խոտհնձիչները արտադրում են ավելի քիչ աղմուկ և արտանետումներ, ինչը հանգեցնում է շրջակա միջավայրի վրա նվազագույն ազդեցության: Բացի այդ, ավտոմատ խոտհնձիչները կարող են կարգավորել խոտհնձման ռազմավարությունները՝ հիմնվելով խոտհարքի իրական պայմանների վրա՝ խուսափելով էներգիայի վատնումից:
Այնուամենայնիվ, այս շուկա մուտք գործելու և հաջողության հասնելու համար անհրաժեշտ է հաշվի առնել մի քանի գործոններ: Նախ, ավտոմատ խոտհնձիչների տեխնոլոգիան պետք է լինի հասուն և հուսալի՝ օգտատերերի գործնական կարիքները բավարարելու համար: Երկրորդ, գնագոյացումը նույնպես կարևոր գործոն է, քանի որ չափազանց բարձր գները կարող են խոչընդոտել ապրանքի ներդրմանը: Վերջապես, համապարփակ վաճառքի և սպասարկման ցանցի ստեղծումը կարևոր է օգտատերերին հարմար աջակցություն և ծառայություններ մատուցելու համար:
Ամփոփելով՝ խելացի ավտոմատացված խոտհնձիչները հսկայական ներուժ ունեն եվրոպական և ամերիկյան շուկաներում: Այնուամենայնիվ, առևտրային հաջողության հասնելը պահանջում է ջանքեր տեխնոլոգիաների, գնագոյացման և ծառայությունների ոլորտում:

Ո՞վ կարող է օգտվել այս բազմամիլիարդանոց հնարավորությունից։
Տեխնոլոգիական հետազոտություններ և զարգացում.Մշտապես ներդրումներ կատարել հետազոտությունների և զարգացման ռեսուրսներում՝ ավտոմատացված խոտհնձիչների ինտելեկտը, արդյունավետությունը և հուսալիությունը բարելավելու համար: Կենտրոնանալ օգտագործողների կարիքների և եվրոպական և ամերիկյան շուկաներում կարգավորող պահանջների հասկացման վրա՝ ապահովելու համար, որ արտադրանքը համապատասխանի համապատասխան չափանիշներին:
Բրենդի կառուցում.Հաստատել չինական խելացի խոտհնձիչների ապրանքանիշի կերպարը միջազգային շուկայում՝ բարձրացնելու սպառողների իրազեկվածությունը և վստահությունը չինական արտադրանքի նկատմամբ: Սա կարելի է իրականացնել միջազգային ցուցահանդեսներին մասնակցելու և Եվրոպայում և Ամերիկայում տեղական գործընկերների հետ համատեղ առաջխաղացման միջոցով:
Վաճառքի ալիքներ՝Ստեղծել համապարփակ վաճառքի ցանց և սպասարկման համակարգ՝ ապահովելու համար ապրանքների սահուն մուտքը եվրոպական և ամերիկյան շուկաներ և ժամանակին տրամադրել տեխնիկական աջակցություն և ծառայություններ: Դիտարկեք համագործակցությունը Եվրոպայի և Ամերիկայի տեղական մանրածախ վաճառողների և դիստրիբյուտորների հետ՝ վաճառքի ուղիները ընդլայնելու համար:
Հրապարակման ժամանակը. Մարտի 22-2024